
With TerraGo Edge 4.1 and any app built with TerraGo Magic 2.1, field users can now easily, remotely capture points, lines, and polygons with high-accuracy using a laser range finder to accelerate data collection work, map difficult to reach locations and minimize physical movements.
Laser Range Finder Settings:
The LASER RANGEFINDERS section in Location configuration will display any laser rangefinders (such as LTI True Pulse 360B, etc.) that you have paired using Bluetooth services. If the Enable laser range finders (LRFs) button is toggled on, Edge will use the paired device to capture the location data.
Note: Since the LTI True Pulse 360B Laser rangefinder is a non-iOS GNSS receiver, the NMEA-BT adapter from Aman Enterprises (which connects to the iOS devices wirelessly using the native Bluetooth built into the iOS devices) will enable you to connect the Laser rangefinder with a serial port to the iOS devices.
To Capture Location:
Note: The Enable laser rangefinders (LRFs) button must be toggled on in Location settings.
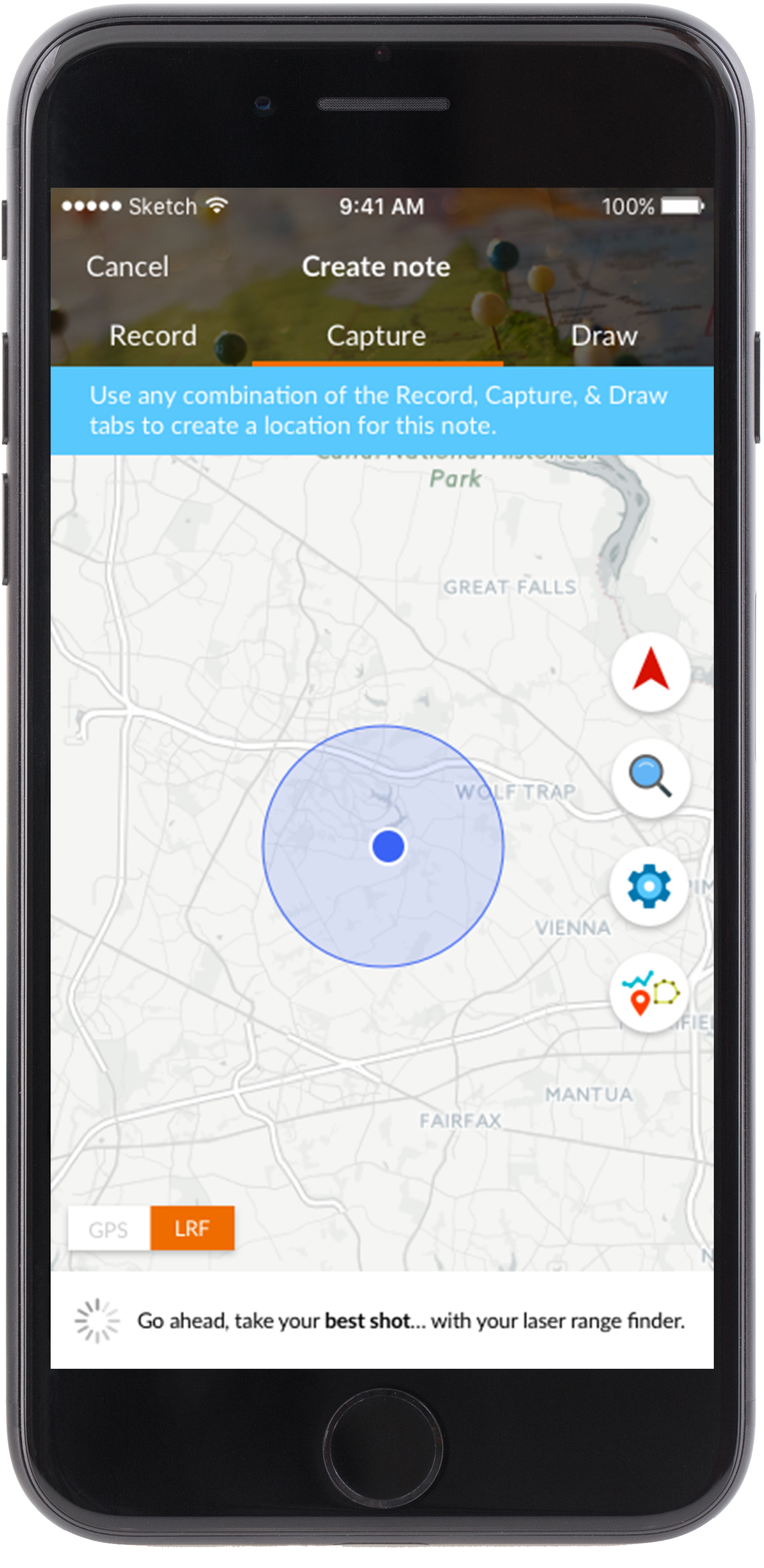
- Toggle on the LRF button at the bottom left of the screen in the capture tab, before you start capturing using the rangefinder.
Note: By default, GPS is toggled on.
- Once a shot is received from the LRF by Edge and the Capture button is pressed, the captured coordinates are displayed at the bottom of the screen.
- A pin marker will be dropped at the point you captured. The coordinates for the point that you selected are displayed on the Location tab.
- You can also draw a line or polygon by using multiple shots. When multiple shots are made, the crosshair icon moves to the new location each time a shot is made.
- Once you finish recording, press Done and you will be taken to the map screen. If it is a line that you have drawn, the total length is displayed. The coordinates for the vertices created during your recording are displayed on the Location tab.
0 Comments